大象机器人-史上最紧凑的教育机械臂mechArm众测


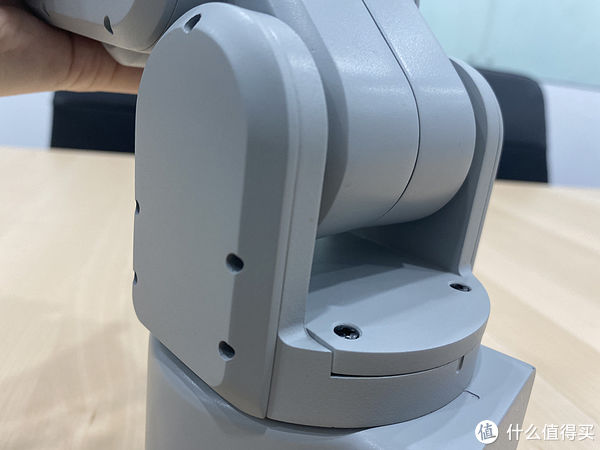
自拍展示
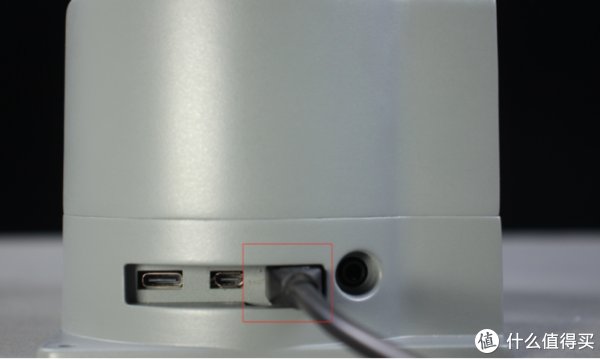
机器人基座接口尺寸

图像识别 丰富配件 应用广泛

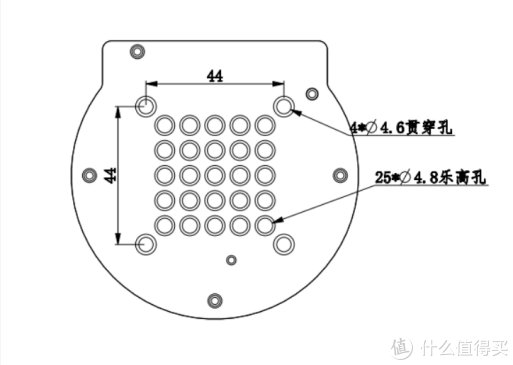
mechArm机器人实际重量为1kg,考虑在使用过程中,随着机器人的运动,其重心会产生移动,所以需要将机器人固定在牢固机座上才可以正常使用。机座重量要求:固定式机座,或移动式机座。
高配置,搭配Lego接口
个人应用下来觉得这款机械臂的性价比还是比较高,如果对桌面级小六轴有需求,值得一买!
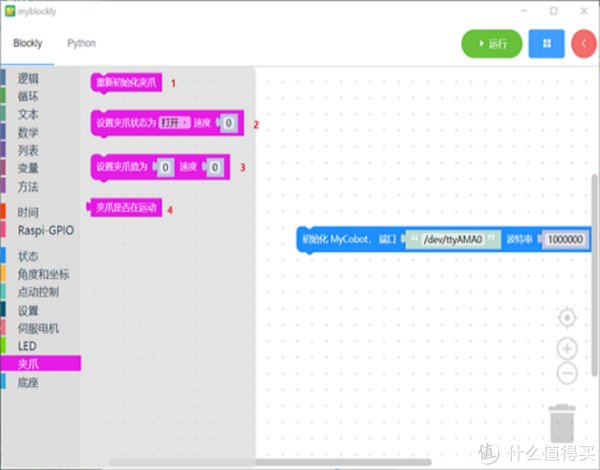
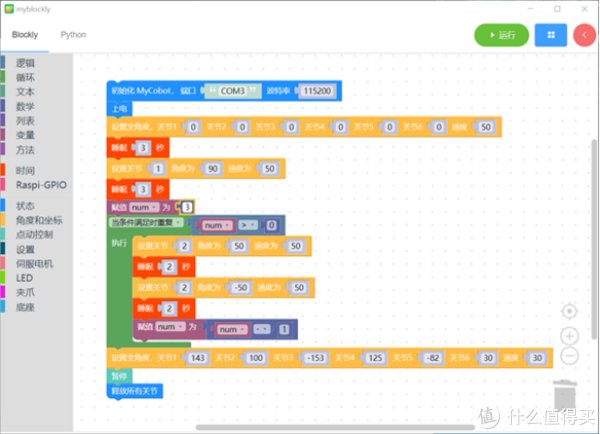
编程演示代码:
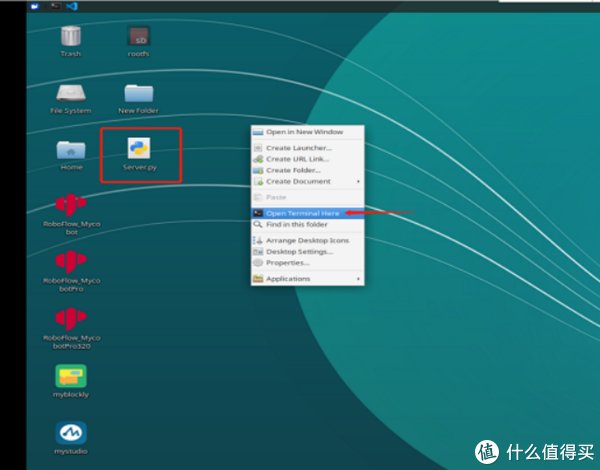
1) 基于 Blockly 的开发使用?myBlockly体现拖拽式编程的思想,是一个图形化编程软件、可视化工具,可以通过拖曳模块,来构建代码逻辑,过程很像搭积木。

官方应用

将机器人搬运至机座安装台面上,调整机器人位置,将机器人基座固定孔位与机座安装台面上的孔位对准。对准孔位后,按压即可。
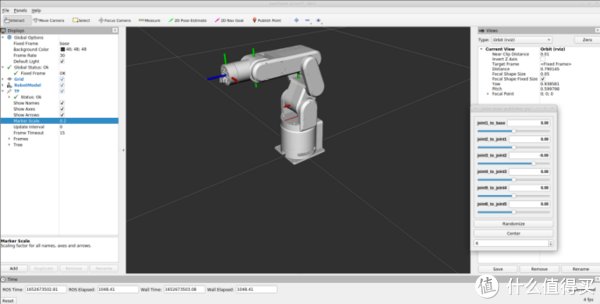
自带ROS,图形化编程Blockly




接下来放一波图片展示:
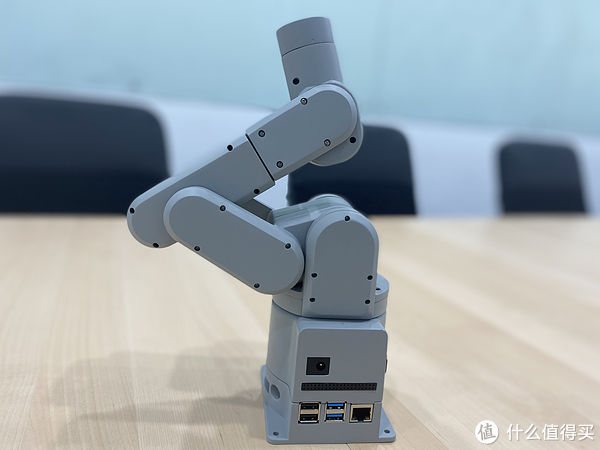
mechArm 270 Pi 版本是自带Ubantu(V-18.04)系统内置了Python、myStudio、myBlockly、ROS、OpenCV以及驱动库,所以无需下载开发软件和安装开发环境(额外的Python库需自行安装),只需要准备一台显示器连接机械臂即可。
因为mechArm 270 Pi版本内置开发环境,直接使用即可。
独特工业设计,极致小巧
从小对机器人就热爱,所以看了很多机器人的科普书籍和小说,把漫威的钢铁侠看了一遍又一遍,长大后基于兴趣,开始自个儿捣腾机器人,在淘宝看到大象机器人机械臂,就买了新品mecharm。
使用配套的HDMI线连接机械臂和显示器:
树莓派与机械臂外壳接口有1-2mm误差,但跟厂家反馈,后续开模就不会
3) 基于 ROS 开发使用?ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。

先将HDMI线插入显示器的HDMI接口。
负载较小,只有250g,需要更多应用可能要大些机械臂
同时将电源适配器连接上机械臂,并将机械臂底座固定在桌子上。
内嵌树莓派生态,开发无限可能
打开包装箱,可以看到mechArm机械臂、mechArm机械臂-产品画册、mechArm机械臂-配套电源、-USB-Type C、跳线、M4*35,杯头内六角,全螺纹,不锈钢螺丝-内六角扳手

就购买产品前,在淘宝对比很多家,选择mecharm主要是因为属于新品,优惠力度较大,而且性能较好,可以写字画画,做棋类对决之类各种创客玩法。在外观上面颜值也很高,秉承选择产品,一流性能,二流外观,三流价格,选择了这款产品。
配件的颜色是白色,机械臂灰色,使用中与配件颜色一致个人感觉更好些
作者:值友



2) 基于 Python 开发使用?我司产品对于python的支持较为友好,对于pythonAPI库的开发也日益完善,通过python能对机器人的关节角度,坐标,夹爪等多方面进行操控,选择性较多
下一篇:没有了